A neurosurgery simulation tool for the treatment of AVM

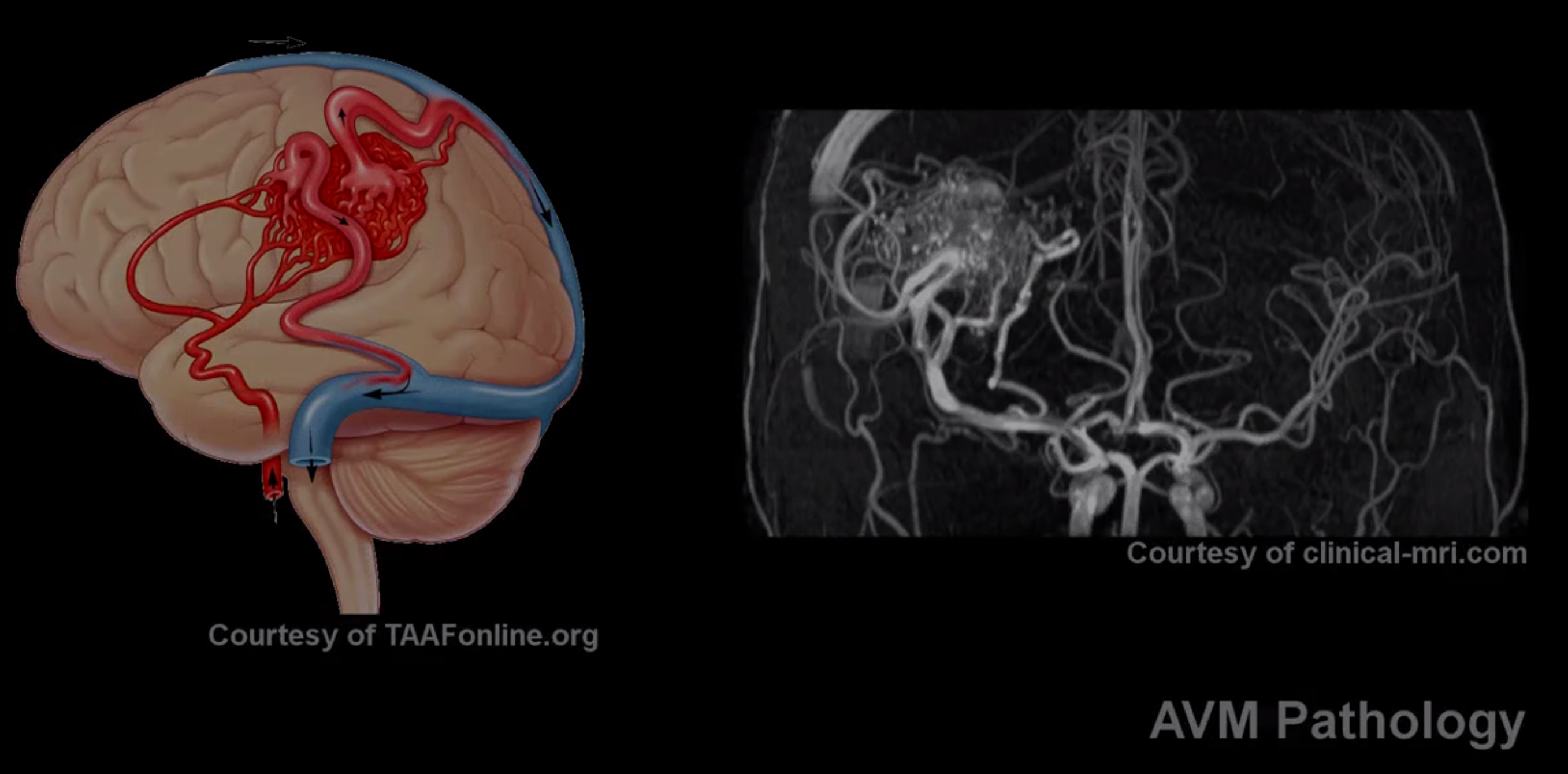
Kitware has been working with the University of North Carolina (UNC), Rensselaer Polytechnic Institute (RPI), and Old Dominion University (ODU) to develop a neurosurgery simulator tool for treatment of Arteriovenous malformation (AVMs). AVMs are abnormal connections between arteries and veins. They appear as a tangle of abnormal arteries and veins and can occur in any part of the brain.
|
|
Treatment options include surgical resectioning; radiosurgery, which involves focusing multiple radiation beams on an AVM to injure and clog it; and intravascular therapy, which involves closing off the vessels of an AVM by one of various nonsurgical means, such as using catheters to deliver agents to block the blood vessels. The main advantage of surgical resectioning is the possibility of removing the malformation in one operation, though operation-related risks include perioperative hemorrhage, infection, cerebral edema, stroke, and death. Due to the risk and complexity of AVM surgery, neurosurgeons need to be highly trained, and a realistic simulator will significantly improve the training process by allowing surgeons to have hands-on experiences without jeopardizing a patient's health. However, existing surgical simulators fail to provide a realistic experience due to limited anatomical modeling and numerical simulation capability.
In this project, we are developing robust surgical simulation tools that simulate the following critical steps of AVM surgical procedure:
- Identifying the margins of the malformation
- Ligation (tying off) or clipping the feeder arterial vessels
- Obliterating draining veins
- Removing the nidus
So far, we have preliminary implementation of the following key components:
- Anatomical modeling pipeline: brain and vessel segmentation, meshing, and model creations
- Mechanical modeling: co-rotational finite element method (FEM)
- Collision detection and response
- Continuous collision detection algorithm
- Penalty and constraint based collision response
- Haptics: Dual Phantom Omni device haptic interface
The following video presents a model of an AVM nidus and demonstrates the tissue-tool interaction.
The next steps of the project will be focusing on the following aspects:
- Collision detection algorithm that can handle topological changes
- More computationally efficient FEMs computations
- Improvement of the visual and haptic interfaces
- Performance evaluation and clinical validation
Further information can be found in the Wiki page dedicated to the project.
ACKNOWLEDGMENT: Research reported in this publication was supported by the Office Of The Director, National Institutes Of Health of the National Institutes of Health under Award Number R44OD018334. The content is solely the responsibility of the authors and does not necessarily represent the official views of the National Institutes of Health.