
MIT/Olin team wins first place at RobotX

The MIT/Olin team recently took first place in the 2014 RobotX competition for robotic surface vessels held in Singapore. Key components of their robotic system include a Velodyne HDL-32E sensor and software based on components from VeloView and VTK. The hardware and software aboard the vessel enabled autonomous navigation of a course requiring navigation, searching for underwater objects, docking, and obstacle avoidance. Components from VeloView enable reading from the Velodyne HDL-32E and converting the data into a format suitable for the processing pipeline which uses components from VTK, PCL, and python. As shown below, A VTK-based viewer is also used for visualization of the processing results.
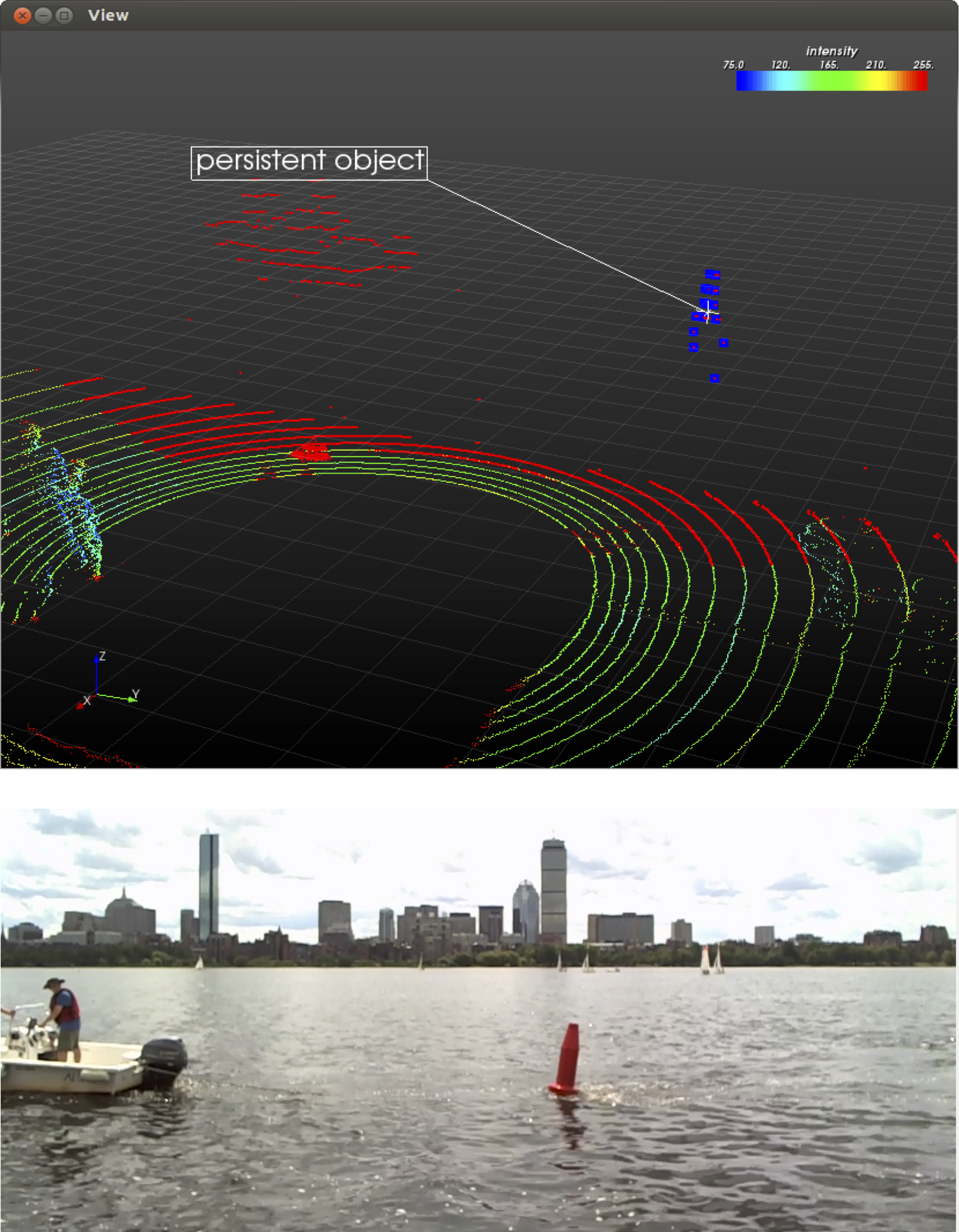
Image Courtsey of MIT/Olin RobotX team at http://oceanai.mit.edu/robotx/pmwiki/pmwiki.php?n=RobotX.SensingSys
For details on how VTK and VeloView components were by team MIT/Olin see their website describing:
For more information on VeloView please see: http://www.paraview.org/Wiki/VeloView