VeloView: Lidar SLAM capabilities
BoE Systems and Kitware demonstrate capabilities of SLAM algorithms for LiDARs mounted on UAVs or other vehicles
![]()
![]()
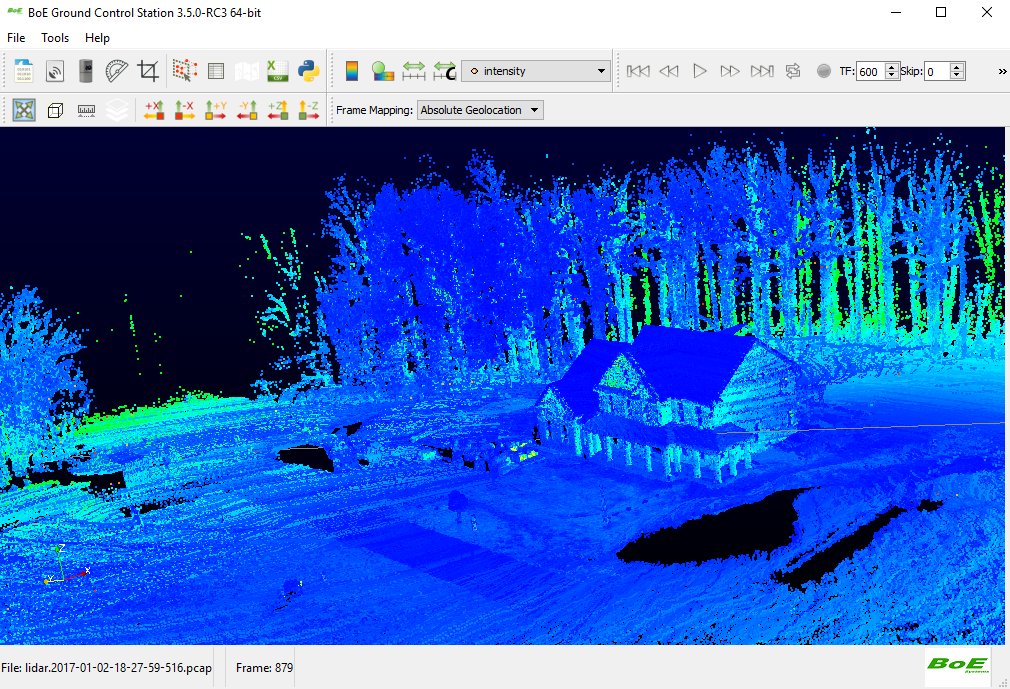
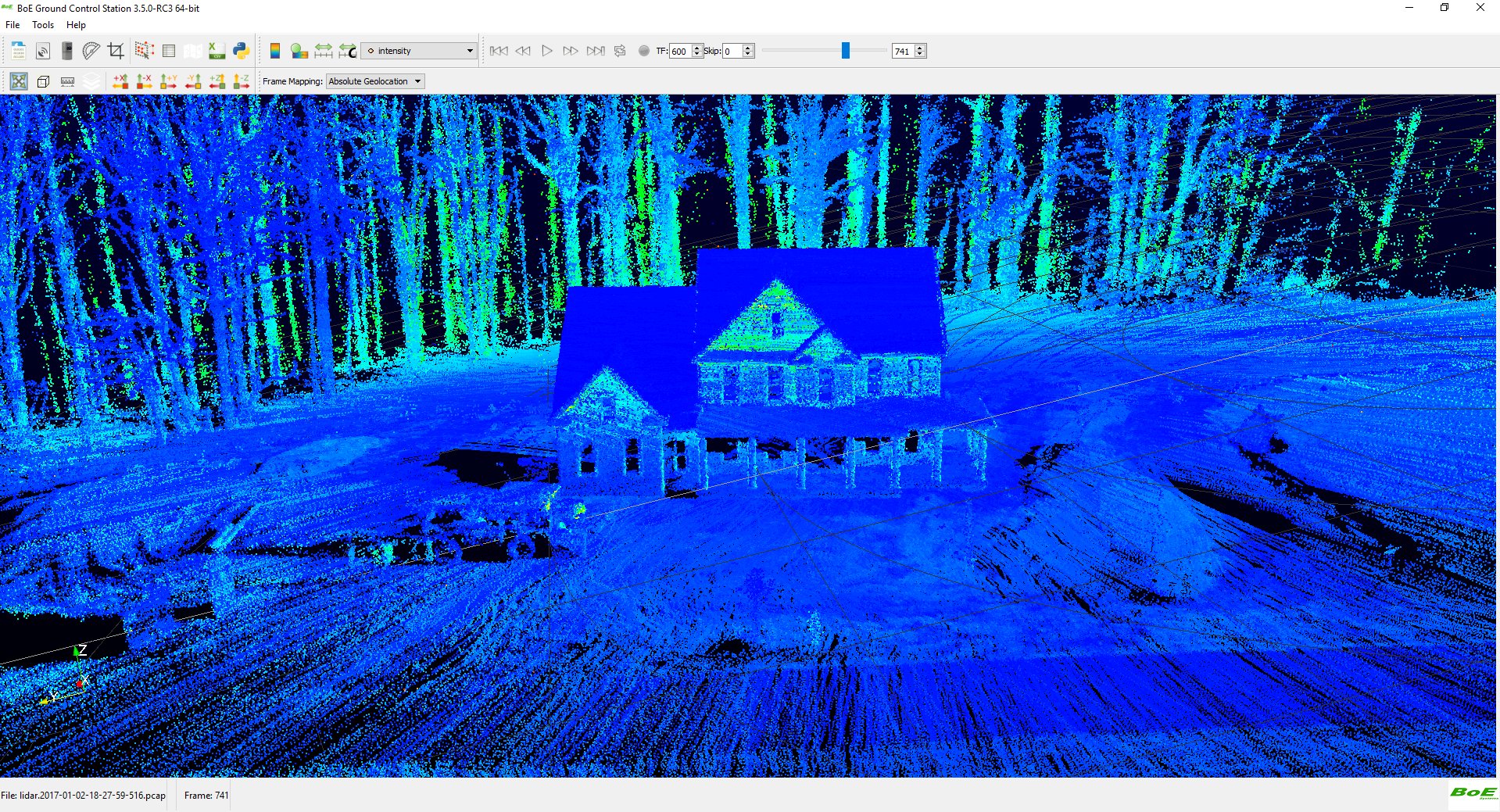
Kitware and BoE Systems are pleased to present the results of Simultaneous Localization And Mapping (SLAM) features embedded into BoE Ground Control Station (BoE GCS). BoE GCS is the VeloView-based software that displays – onsite – scan 3D results and their coverage.

VeloView is a free open-source ParaView-based application developed by Kitware. It is designed for the visualization and analysis of raw data from the Velodyne LiDAR sensors as 3D point cloud. Thanks to its open-source nature, custom versions can be developed, containing specific enhancements. A custom version, known as BoE Ground Control Station (BoE GCS), was developed for BoE Systems (formerly known as VisionNRG). It performs Simultaneous Localisation And Mapping (SLAM) and optionally uses the IMU for sensor fusion.
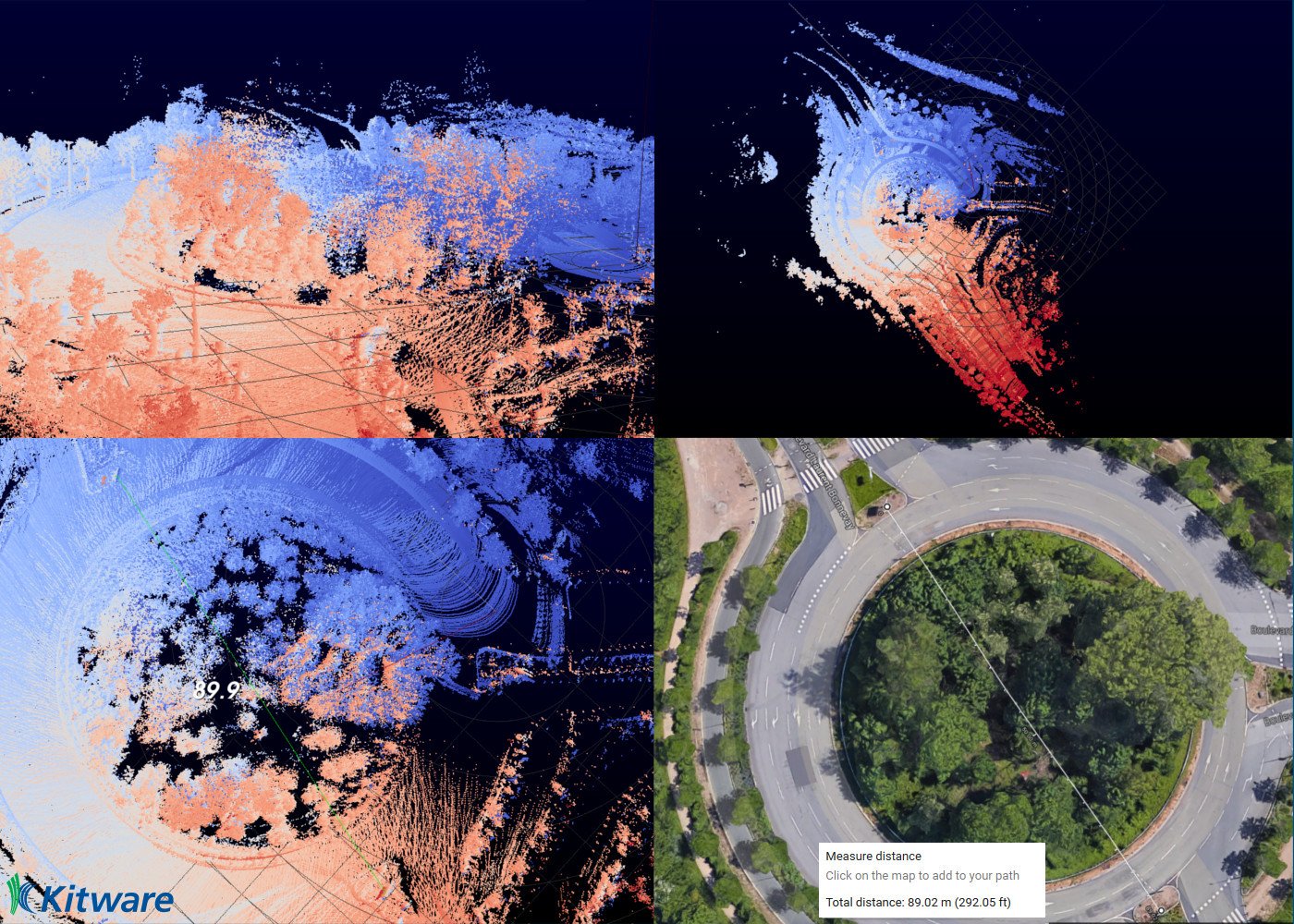
Kitware based their developments on a state-of-the-art algorithm [1]. The main goal of SLAM is to construct and update a map of an unknown environment while simultaneously keeping track of the LiDAR’s location within it. Velodyne’s Lidar sensors capture a full 360° 3D scan, up to 20 times per second. Each scan holds 16/32/64 scanlines, depending on the particular device. At each frame, key points, belonging to edges and planes, are extracted from the 3D geometry acquired by the LiDAR. This extraction step generates one point cloud per acquisition. Two successive point clouds are registered by computing the transformation expressing the relative movements between them. This operation is called odometry.
The odometry gives an initial location of the UAV on the map, which is optimised using the complete map. Once the UAV location is fully computed for one time-step, the map is updated to register newly seen areas.
Optionally, the odometry can take advantage of an Inertial Measurement Unit (IMU) and GPS, when available, to create georeferenced 3D point-clouds. BoE Systems offers such scanning services.
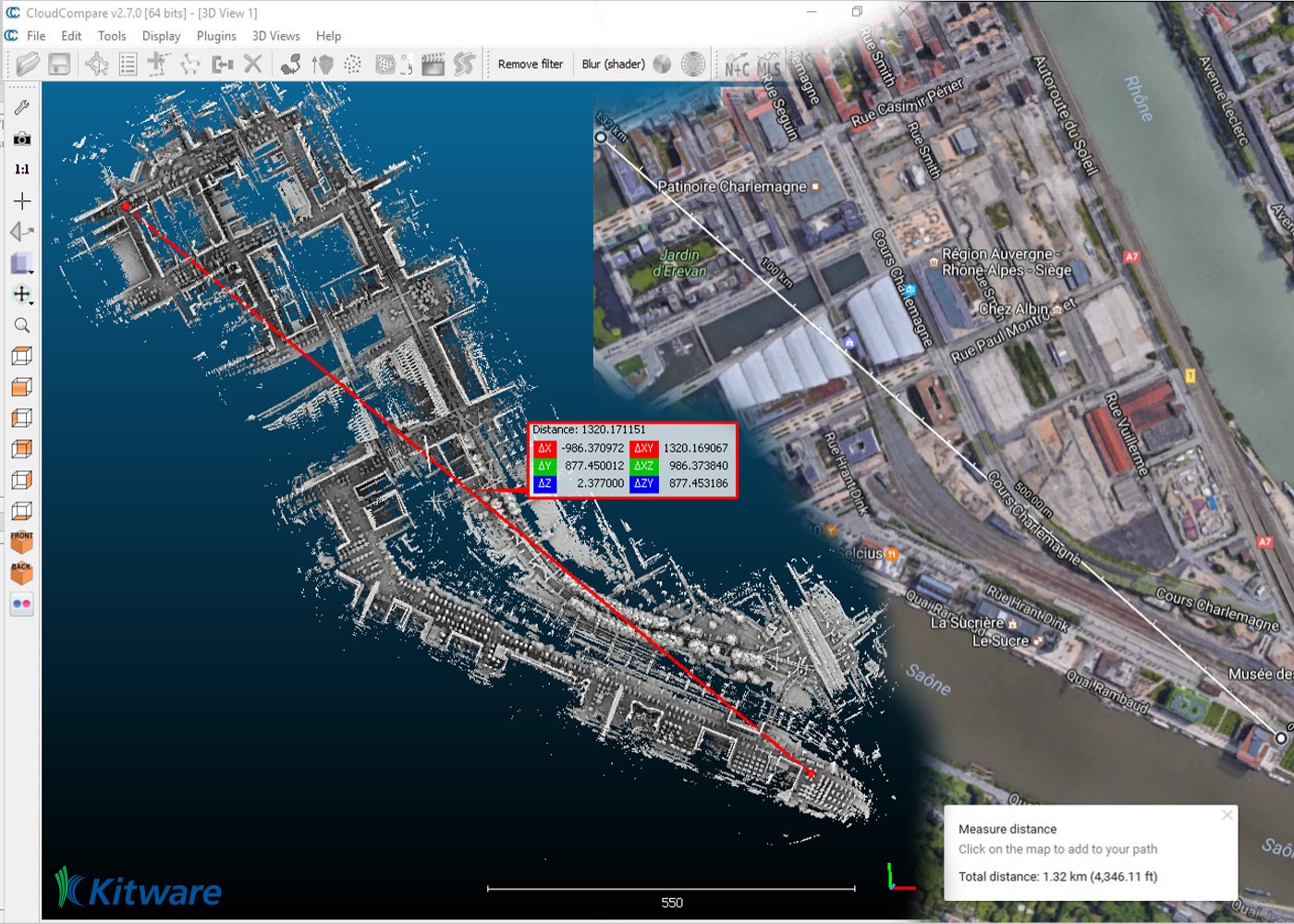
Kitware’s and BoE’s teams are very enthusiastic about the results, since it performs SLAM with less than 0.5% of drift error, over a 23km loop with a VLP-16 on a car roof. This new feature enables the scanning team to check on-site if they covered everything, minimizing the overhead of coming back to acquired missed areas.

Stay tuned for an extended technical post explaining details of the algorithm.
To learn more about VeloView, including links to the source code and Velodyne sample data, please visit the VeloView wiki. [Please notice that a new version will soon be released.]
If you are interested by scanning services or buying a scanning UAV, please visit www.boesystems.com or go on Instagram and search BoE Systems to find pictures and information.
[1] LOAM: Lidar Odometry and Mapping in Real-time. J. Zhang and S. Singh. Robotics: Science and Systems Conference (RSS). Berkeley, CA, July 2014
This work was supported by BoE Systems.
![]()
Developments were done by Kitware.![]()
 Bastien Jacquet, PhD is a Technical Leader at Kitware, France.
Bastien Jacquet, PhD is a Technical Leader at Kitware, France.
Since 2016, he promotes and extends Kitware’s Computer Vision expertise in Europe. He has experience in various Computer Vision subdomains, and he is an expert in 3D Reconstruction and related mathematical tools.
 Pierre Guilbert is a computer vision R&D engineer at Kitware, France.
Pierre Guilbert is a computer vision R&D engineer at Kitware, France.
He has experience in Machine Learning Classification for medical imagery and image registration in 2D and 3D. He is familiar with 2D and 3D processing techniques.
Since 2016, he works at Kitware on multiple projects related to point-cloud reconstruction and analysis.
Hi
It seems the SLAM mapping is not fully functioning in VeloView 3.5, also will it be possible to export the data SLAM data in some other format. ??
Thanks
Vishal
Can you provide some additional information or link to documentation on SLAM?
Hi
Same question here/ specially how to make GPS/IMU and Velodyne HDL64 works (synchronousley) to record data? and document on this?
Hello,
VeloView 4.0 should be released soon, in the meantime you can download and build the sources from the public github repository:
https://github.com/Kitware/VeloView
Specifics build instructions are available in the issue #51:
https://github.com/Kitware/VeloView/issues/51
Regards,
Pierre Guilbert