Cross-Compiling for Raspberry Pi

| Index To the Series |
| 1. Raspberry Pi likes Open Source |
| 2. Cross-Compiling for Raspberry Pi |
| 3. Cross-Compiling ITK for Raspberry Pi |
| 4. Raspberry Pi likes VTK |
| 5. Raspberry Pi likes Node.js |
Cross-Compiling for Raspberry Pi
|
|
|

Using a Dell Precision M6700 (Ubuntu 12.10) to build binaries for the Raspberry Pi
This is a follow up on our exploration of the Raspberry Pi.
Thanks to Andrew Maclean who generously shared with us his recipe to cross-compile for the Raspberry Pi in the comments of our previous blog.
Two of the main challenges with cross-compilation are that:
- There are many ways to do it.
- Recipes out there have some missing ingredients.
Here we are following Andrew’s recipe, and adding comments and small updates as we go about the process.
(Please share with us your variations, and improvements to this recipe).
We are doing this in a DELL PRECISION M6700 Laptop running Ubuntu 12.10.
Note about the images in this blog post: We captured a good number of screenshots to document the process below. The images may appear in low resolution in the blog and may be hard to read, but if you click on them, you will get the full resolution image of the screenshot and text should appear very clearly on them.
Step 1. Build the Toolchain
Since we are going to run in laptop with an Intel processor, and we want to build object code for the ARM processor at the heart of the Raspberry Pi, we need a cross-compiler and its associated tools, which is usually called a “toolchain“. Here we are using “crosstool-ng” to build such tool chain.
Following Andrew’s advice, many of the instruction below follow this post by Chris Boot:
http://www.bootc.net/archives/2012/05/26/how-to-build-a-cross-compiler-for-your-raspberry-pi/
Step 1.1 Download crosstool-ng
We go to: http://crosstool-ng.org/#download_and_usage
and download the most recent version, that at the time of writing this blog was: 1.17.0
note that in the download page, the version numbers are sorted alphabetically (not numerically).
In my first visit, I went straight to the bottom of the page and erroneously grabbed version 1.9.3,
just because it was at the bottom of the page…
This link below, with the downloads sorted by date, might be useful to you:
The file 00-LATEST-is-1.17.0 should have also be a hint… if I were paying attention… 🙂
We created a directory to host it and then downloaded and extracted the sources by doing:
- mkdir -p ~/src/RaspberryPi/toolchain
- cd ~/src/RaspberryPi/toolchain
- wget http://crosstool-ng.org/download/crosstool-ng/crosstool-ng-1.17.0.tar.bz2
- tar xjf crosstool-ng-1.17.0.tar.bz2
- cd crosstool-ng-1.17.0
Step 1.2 Configure and Build
Here we continue following Chris Boot’s instructions.
We chose to configure the tool to be installed in a local directory inside our home directory.
- cd ~/src/RaspberryPi/toolchain/crosstool-ng-1.17.0
- mkdir -p ~/local/crosstool-ng
- ./configure –prefix=/home/ibanez/local/crosstool-ng
to get this to work, we had to install the following Ubuntu packages (most of which were listed in Andrew’s recipe),
- bison
- cvs
- flex
- gperf
- texinfo
- automake
- libtool
The whole is done with the command:
- sudo aptitude install bison cvs flex gperf texinfo automake libtool
then we can do
- make
- make install
and add to the PATH the bin directory where crosstool-ng was installed:
- export PATH=$PATH:/home/ibanez/local/crosstool-ng/bin/
In some cases, it might be necessary to unset the LD_LIBRARY_PATH,
to prevent the toolchain from grabbing other shared libraries from the host machine:
- unset LD_LIBRARY_PATH
Step 1.3 Build Raspberry Toolchain
Create a staging directory. This is a temporary directory where the toolchain will be configured and built, but it is not its final installation place.
- mkdir -p ~/src/RaspberryPi/staging
- cd ~/src/RaspberryPi/staging/
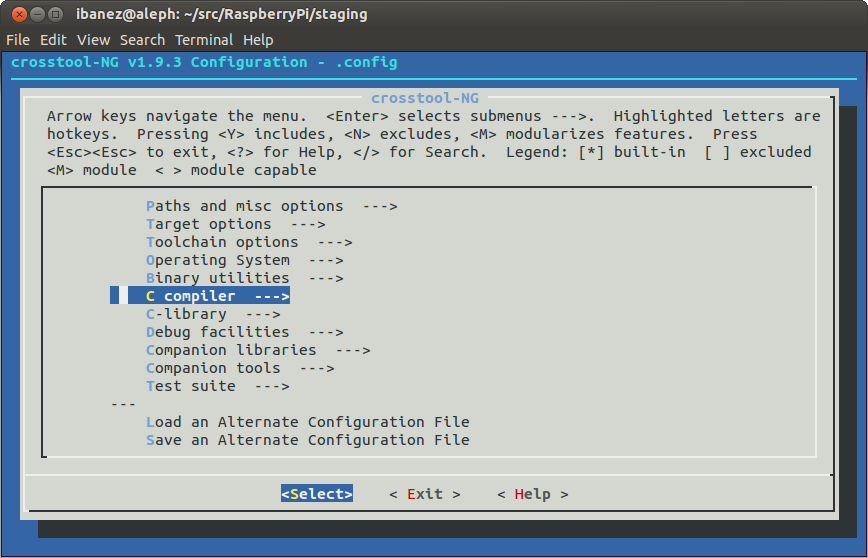
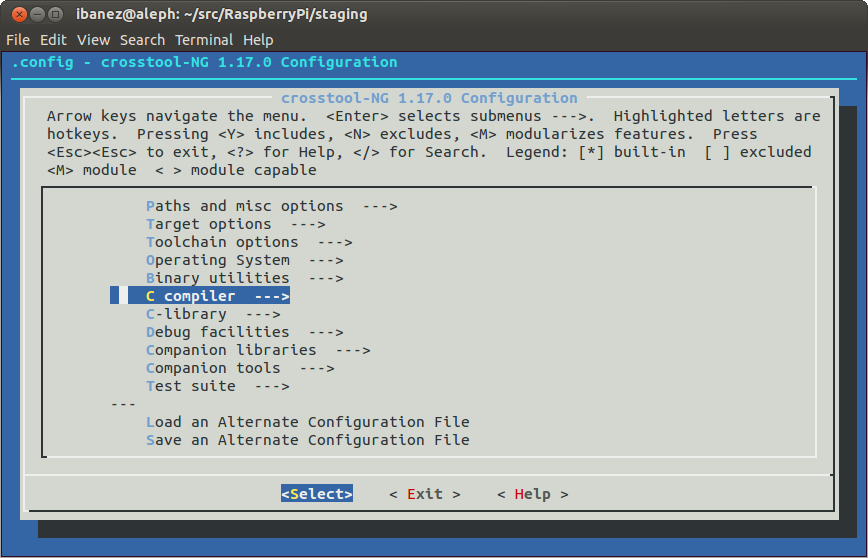
- ct-ng menuconfig
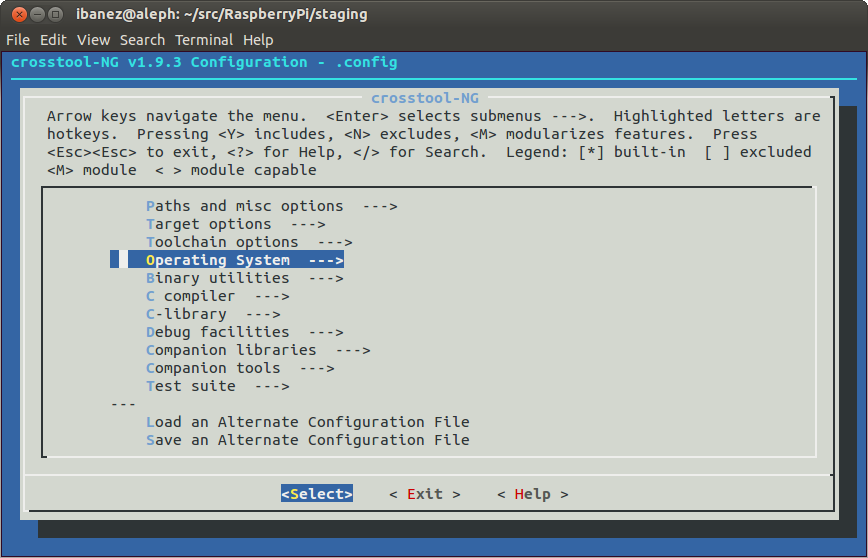
You will see a menu similar to:
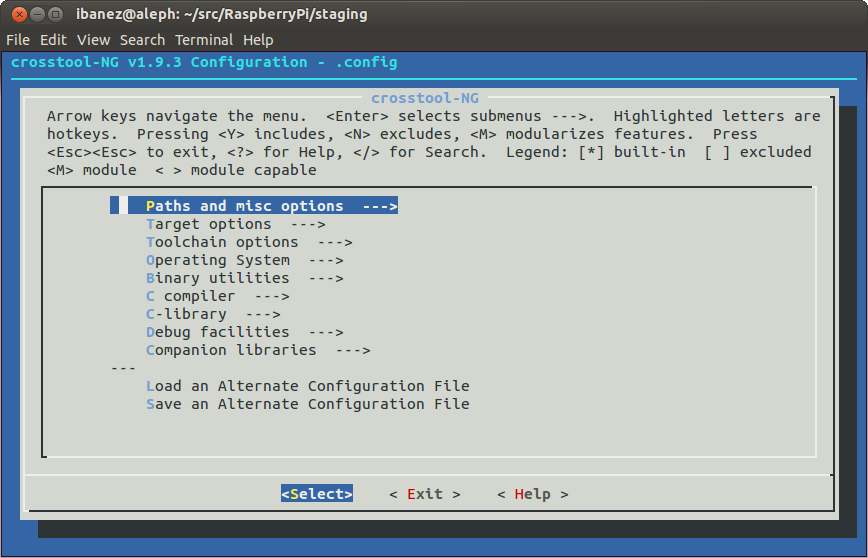
- Go into the option “Paths and misc options”
- Enable the option “Try features marked as EXPERIMENTAL”

- In the option “Prefix Directory (NEW)”, one can set the actual destination directory where the toolchain will be installed.
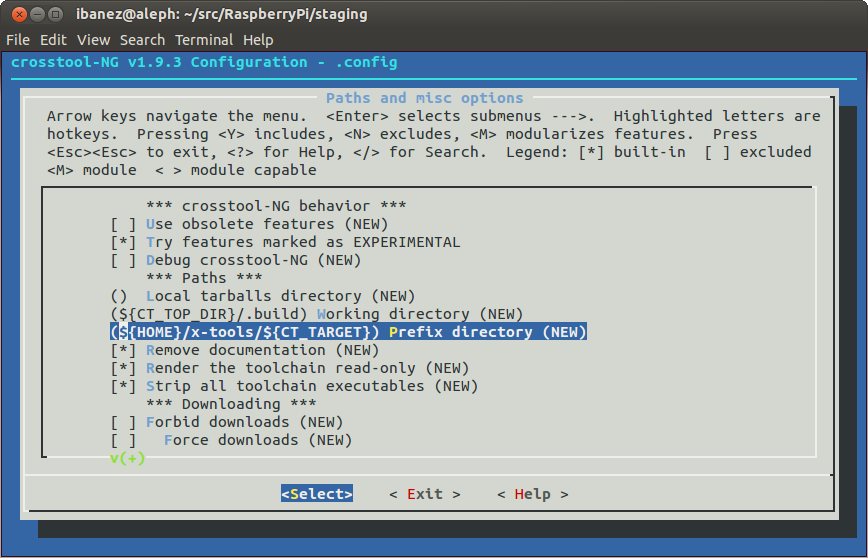
- In this case we choose to install in ${HOME}/local/x-tools/${CT_TARGET}.
Others may prefer /opt/cross/x-tools/${CT_TARGET}, for example.

- After you select < Ok >
- Select the < Exit > option to go back to the main menu
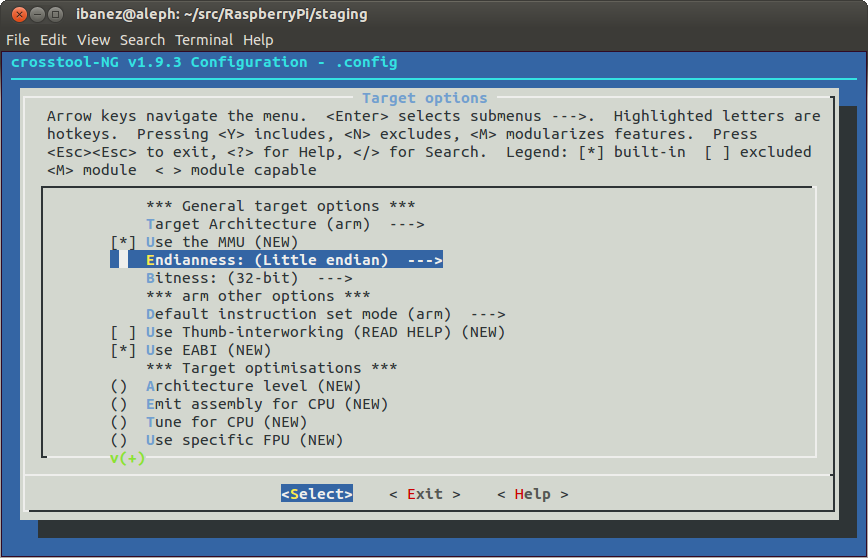
- There, select “Target options”.
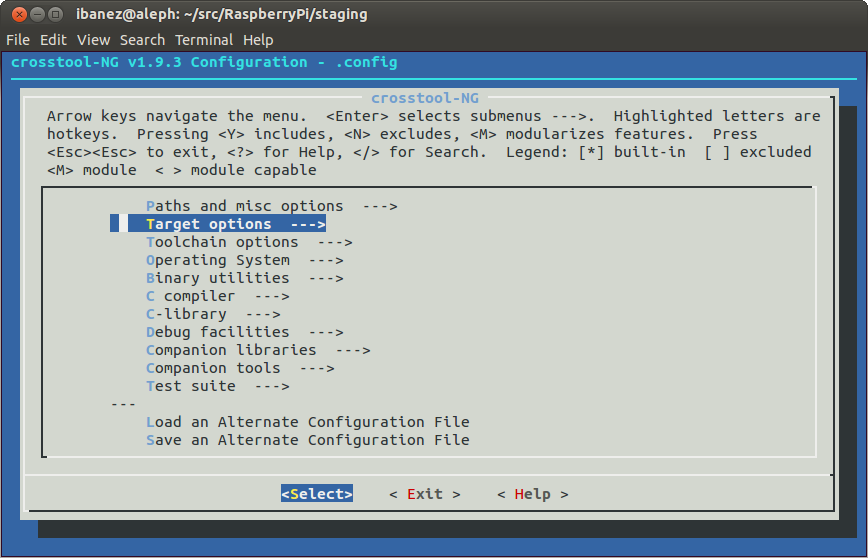
- Change the Target architecture to arm.
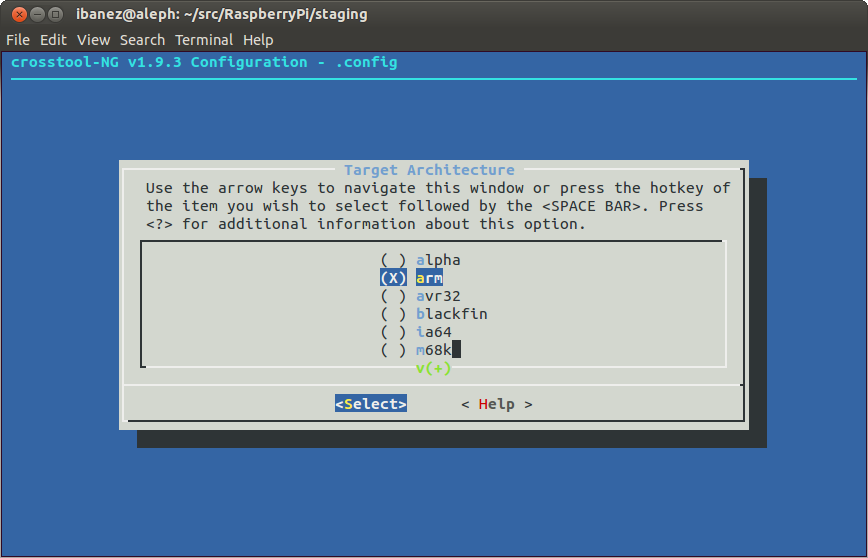
- Leave Endianness set to Little endian and
- Bitness set to 32-bit.
- Use again the < Exit > option to go back to the main menu
- Select “Operating System”
- There, change the “Target OS” option from (bare-metal)
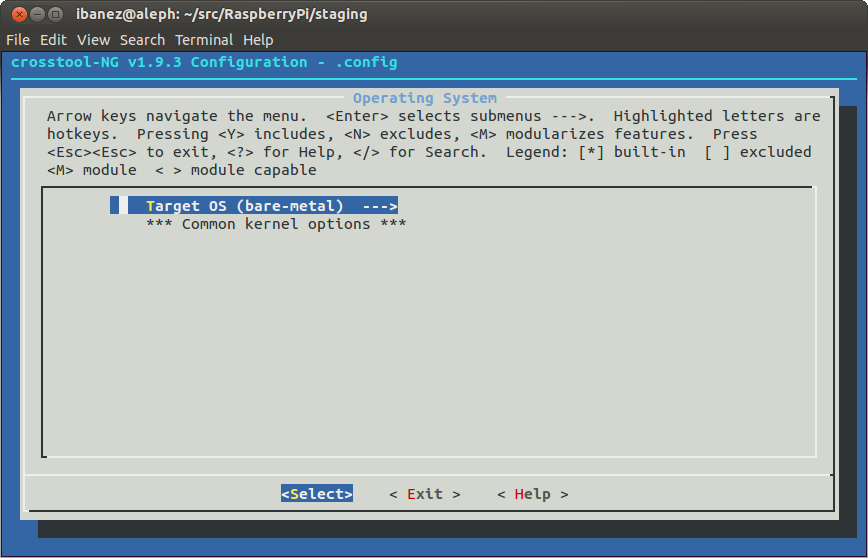
- to the option “linux”
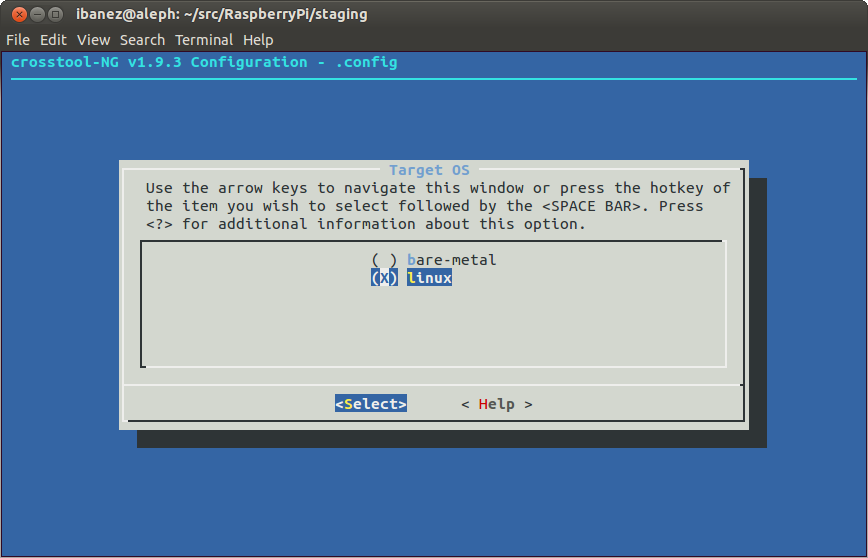
- Take the <Select> option
- Use the < Exit > option to get back to the main menu
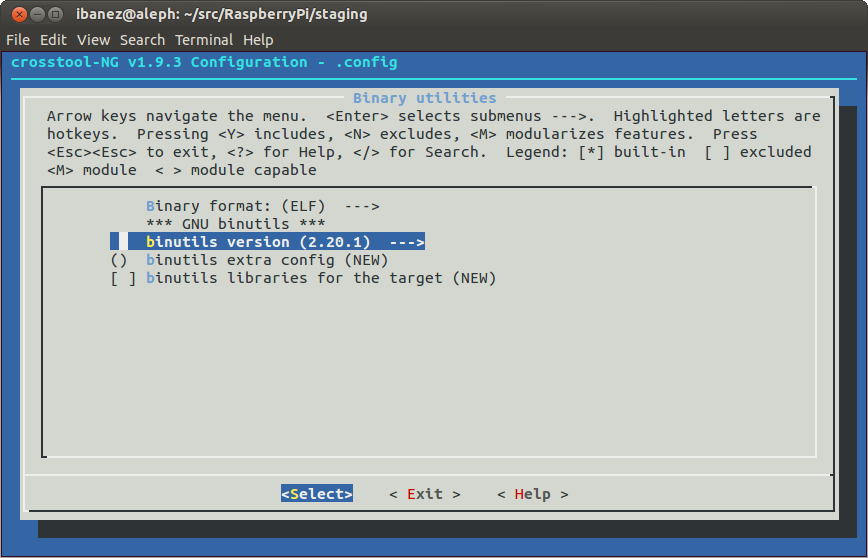
- Select “Binary utilities”
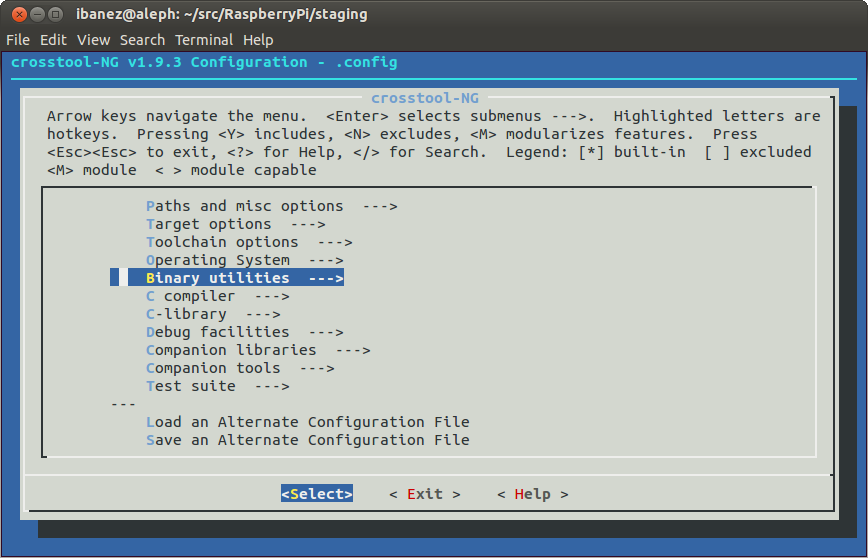
- Select “binutils version”
- Take the most recent version that is not marked as EXPERIMENTAL.
In our case, that was version 2.21.1a
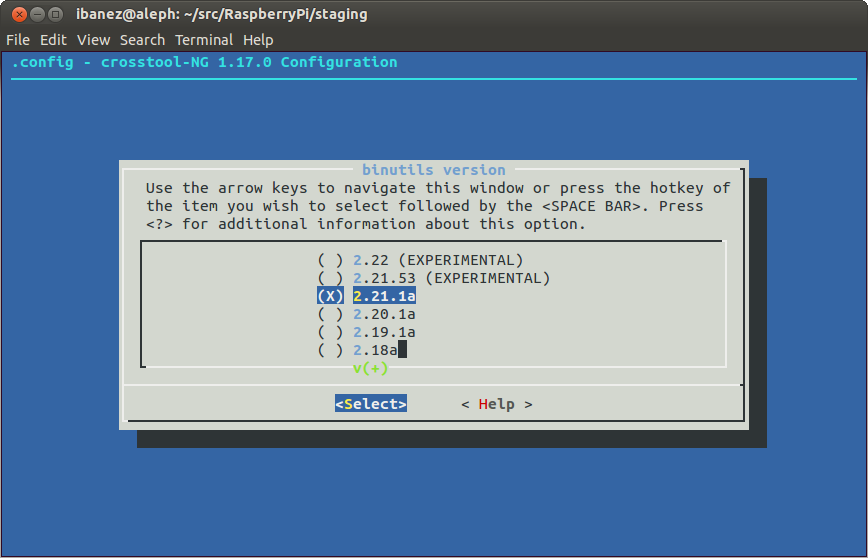
- Go back to the main menu
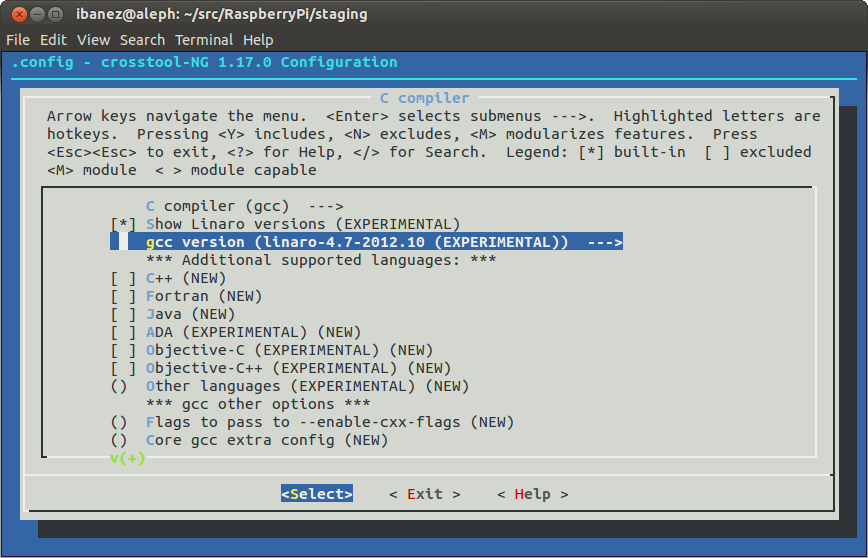
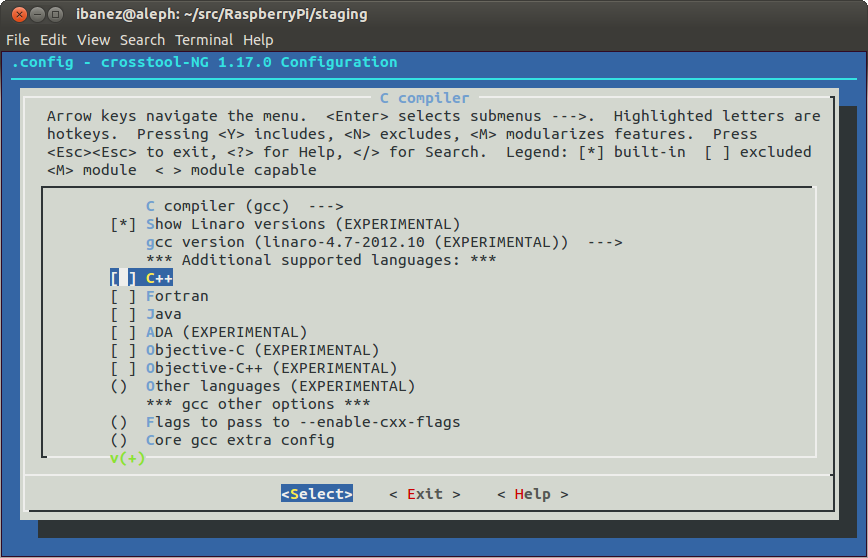
- Select “C compiler”
- Enable the Show Linaro versions (EXPERIMENTAL) option.
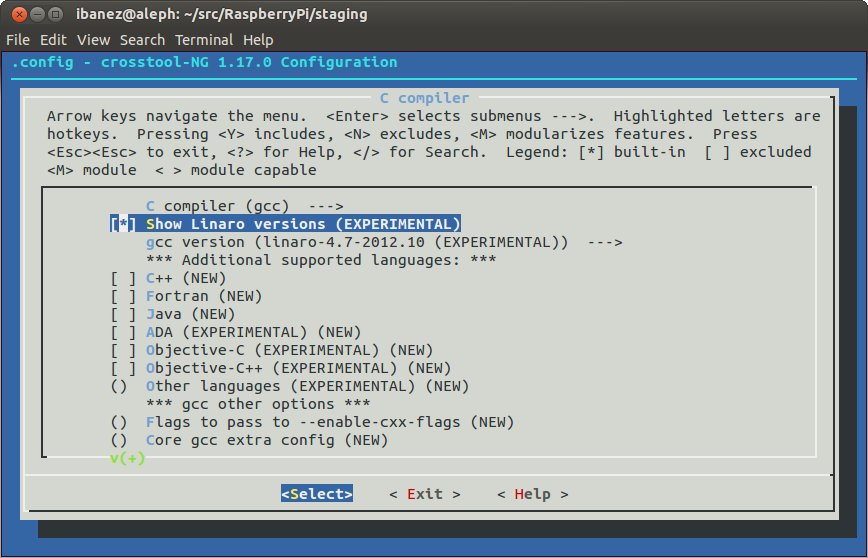
- Here we selected the “linaro-4.7-2012.10 (EXPERIMENTAL) ”
This is a bit newer than the version “linaro-4.6-2012.04 (EXPERIMENTAL)”
that Chris Boot was using in his blog post, so here we are taking our chances…
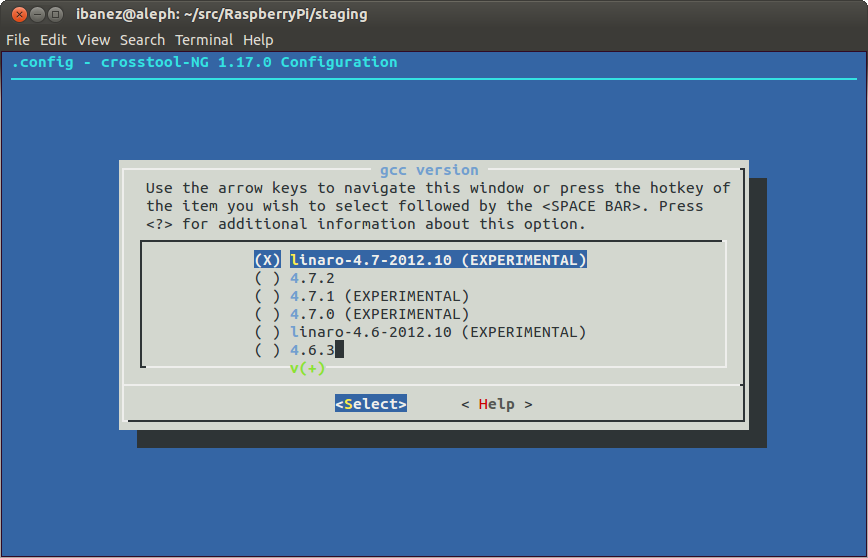
- Select that option.
- Exist the configuration and
- Save the changes
| Note contributed by Scott Determan:
If you want to cross-compile code that used C++11 futures/promises, –with-arch=armv6. To do this, use the command ct-ng menuconfig, and go to the item: Target options -> Architecture level and set it to “armv6” (without quotes), then you will be able to cross compile code that uses futures/promises.
Thanks Scott ! |
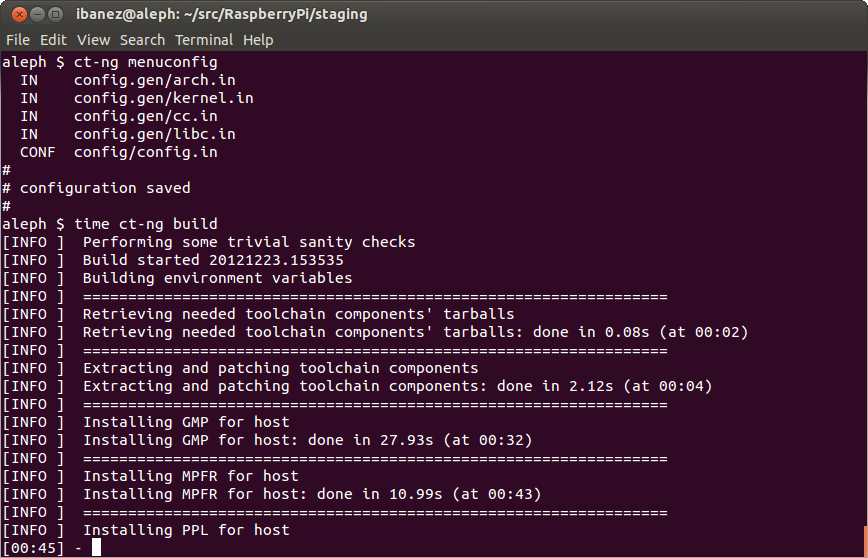
Then, start the build process by typing
- ct-ng build
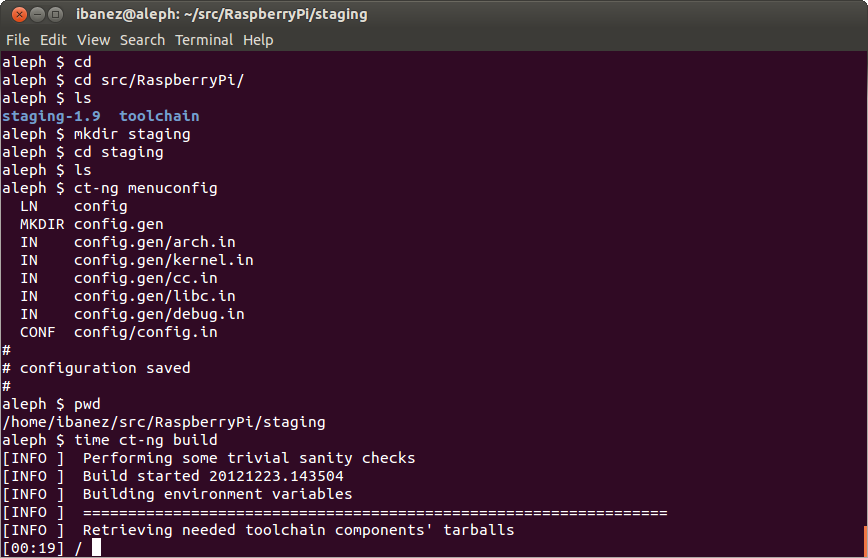
- Since this will take a while, Chris recommends here to go and get Coffee (or lunch)…
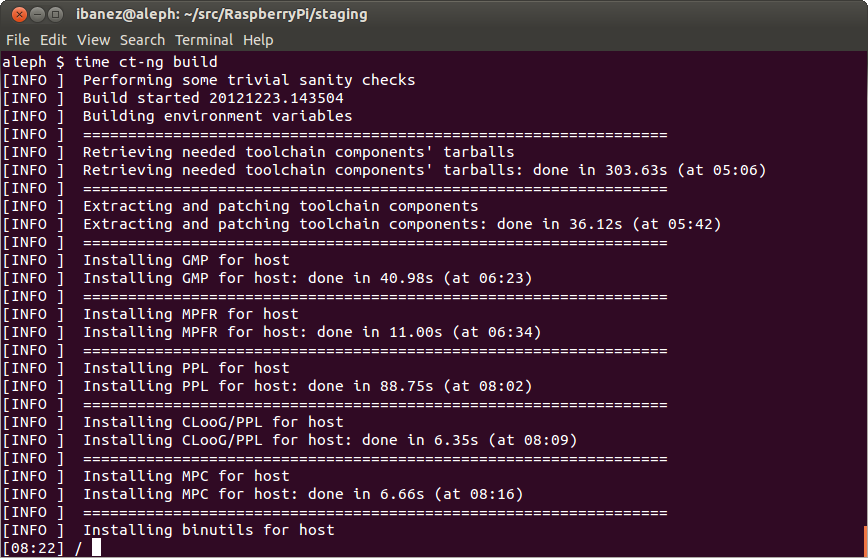
- It was nice to see that the build projects uses the proper “make -j ” options for parallel building
and therefore makes use of all the available cores:

Not to be a whiner…. but,…
the problem with this,
is that it only gives us 18minutes and 9 seconds for the Coffee break 🙂
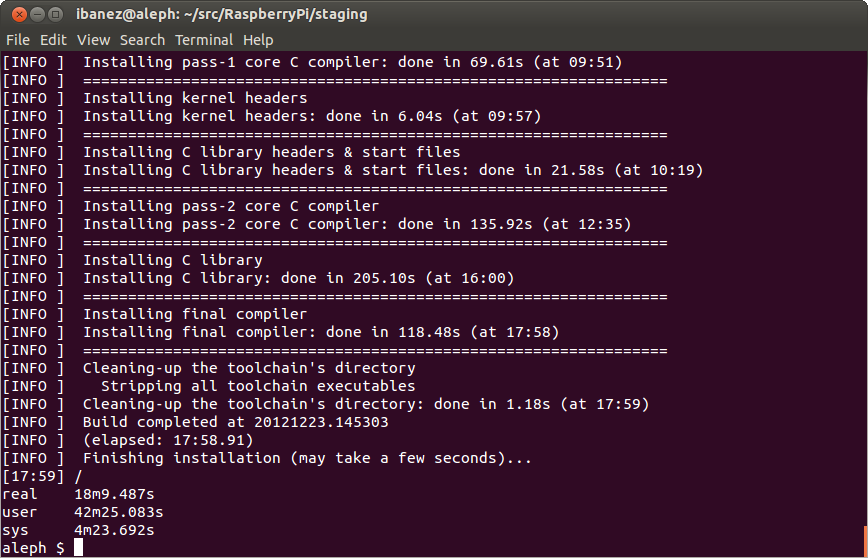
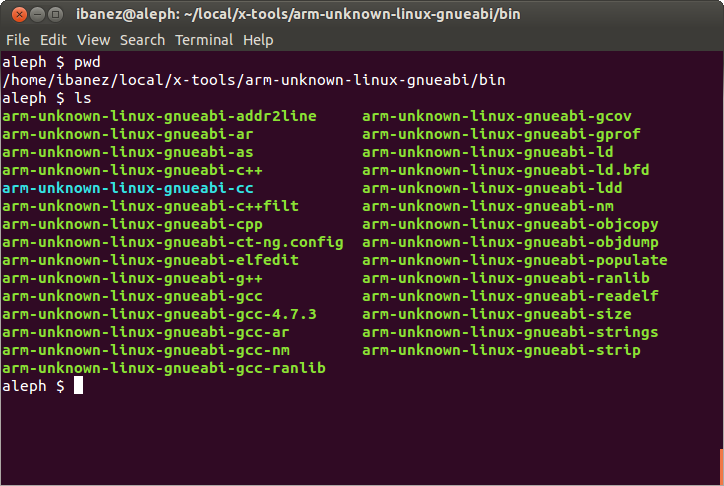
- When the build process finishes, we end up with the toolchain installed in the “prefix” directory.
In our case: ${HOME}/local/x-tools/${CT_TARGET} - More specifically:
/home/ibanez/local/x-tools/arm-unknown-linux-gnueabi - Where we will find the following collection of executables in the “bin” directory:
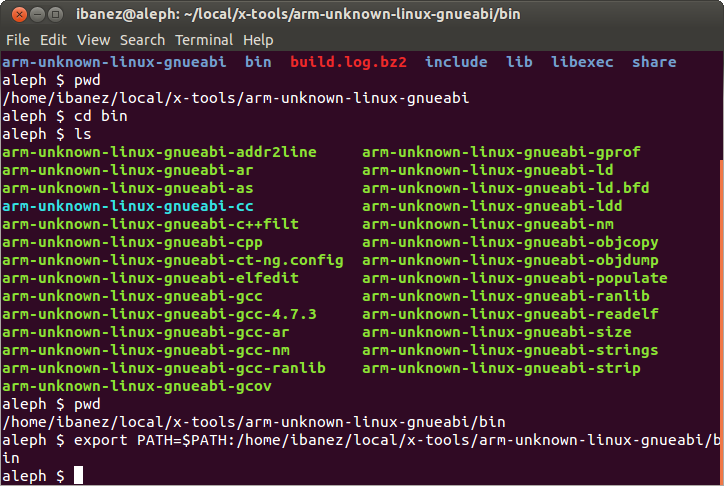
- We now add this directory to the PATH:
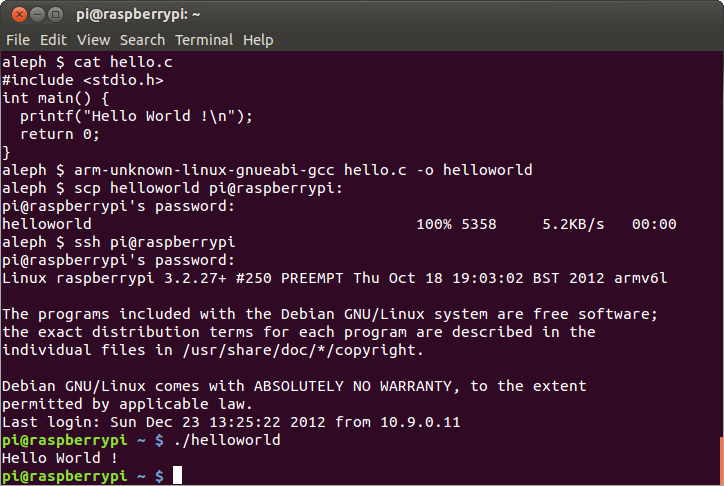
export PATH=$PATH:/home/ibanez/local/x-tools/arm-unknown-linux-gnueabi/bin - We can then test the toolchain with a “hello world” small C program.
- Compiling it locally as “helloworld” (in “aleph” which is the name of our Ubuntu Laptop).
- Then copying it into the Raspberry Pi
- and finally running it there
Step 1.4 Build the C++ compiler in the toolchain
By default, our process above only built the C compiler.
We are now going to build the C++ compiler as well.
To build the C++ compiler we do the following:
- We go back to the staging directory:
/home/ibanez/src/RaspberryPi/staging - and run the configuration process
ct-ng menuconfig - We go into the “C compiler” option
- Enable the option “C++”
- Save and Exit
- and type again
“ct-ng build”
to build the toolchain.
This time it took 13 minutes 18 seconds
and we have now the new C++ components in the toolchain binary directory
Time to test the C++ compiler with a Hello World.
- We build it locally
- Copy the executable to the Raspberry Pi
- Login in the Raspberry Pi
- Execute the cross-compiled executable

This completes the set up of the tool chain.
We are now ready to use CMake to cross compile bigger projects.
Step 2. One CMake File to Rule Them All !
We now turn our attention to the Cross Compilation instructions of the CMake Wiki
The first step here is to write a .cmake file that points to the toolchain.
In our case we choose to call this file:
- Toolchain-RaspberryPi.cmake
and put on it the following content
# this one is important
SET(CMAKE_SYSTEM_NAME Linux)
#this one not so much
SET(CMAKE_SYSTEM_VERSION 1)
# specify the cross compiler
SET(CMAKE_C_COMPILER
/home/ibanez/local/x-tools/arm-unknown-linux-gnueabi/bin/arm-unknown-linux-gnueabi-gcc)
SET(CMAKE_CXX_COMPILER
/home/ibanez/local/x-tools/arm-unknown-linux-gnueabi/bin/arm-unknown-linux-gnueabi-g++)
# where is the target environment
SET(CMAKE_FIND_ROOT_PATH
/home/ibanez/local/x-tools/arm-unknown-linux-gnueabi)
# search for programs in the build host directories
SET(CMAKE_FIND_ROOT_PATH_MODE_PROGRAM NEVER)
# for libraries and headers in the target directories
SET(CMAKE_FIND_ROOT_PATH_MODE_LIBRARY ONLY)
SET(CMAKE_FIND_ROOT_PATH_MODE_INCLUDE ONLY)
Note here that the path
- /home/ibanez/local/x-tools/arm-unknown-linux-gnueabi
is the base directory where we installed the toolchain.
and the file names
- arm-unknown-linux-gnueabi-gcc
- arm-unknown-linux-gnueabi-g++
are the names of the generated C and C++ compilers respectively.
We now put the cmake toolchain file in the directory:
- /home/ibanez/bin/RaspberryPi/CMakeToolChain
Then we create a CMake-based Hello World example:
- mkdir -p /tmp/hello/src
- mkdir -p /tmp/hello/bin
- cd /tmp/hello/src
write here a CMakeLists.txt file with just:
cmake_minimum_required(VERSION 2.8)
project(HelloWorld)
add_executable(HelloWorld HelloWorld.cxx )
target_link_libraries(HelloWorld)
and the associated HelloWorld.cxx file with:
#include <iostream>
int main() {
std::cout << “Hello World++ !” << std::endl;
return 0;
}
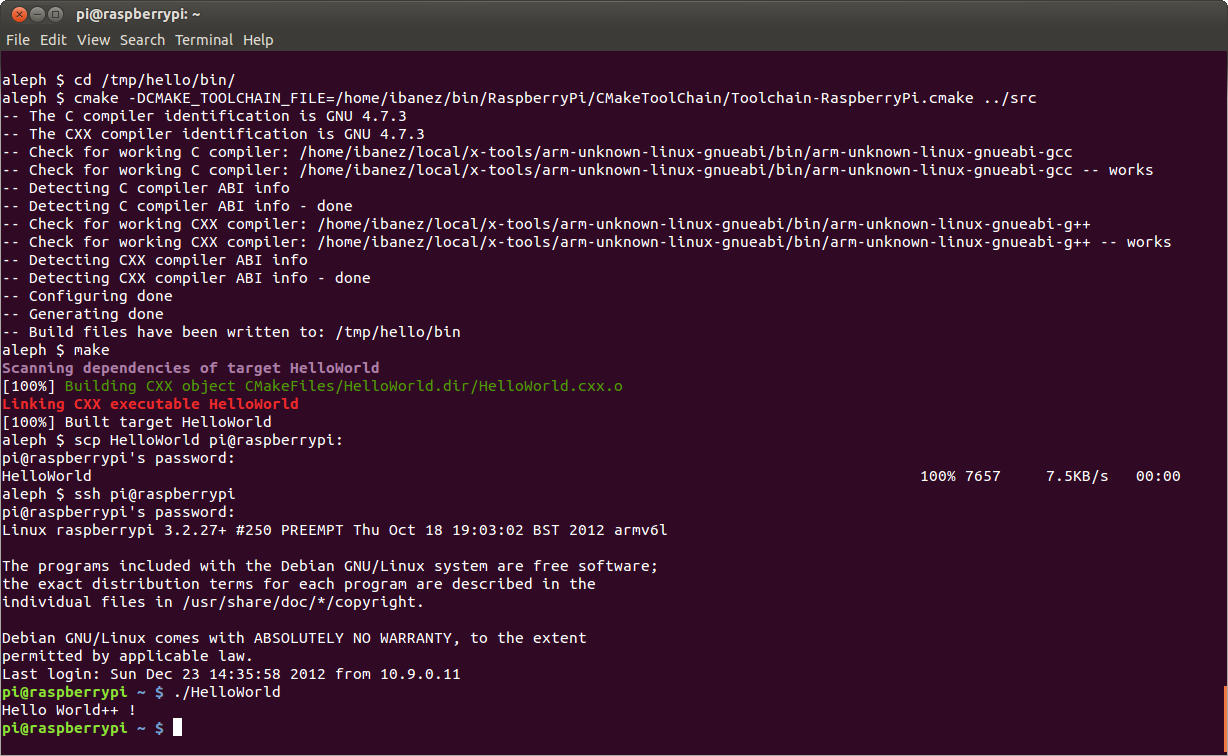
Then, we can change directories to the bin directory and configure with CMake, by pointing to the toolchain file as:
- cd /tmp/hello/bin
- cmake -DCMAKE_TOOLCHAIN_FILE=/home/ibanez/bin/RaspberryPi/CMakeToolChain/Toolchain-RaspberryPi.cmake ../src
- and simply build with “make”
- Then copy the resulting executable to the Raspberry Pi, and run it.
Step 3. Setting up additional bin and lib files for cross compiling.
(for example if you have built the latest boost libriaries on the RaspberryPi
and it is installed in /usr/local), you can copy these to a directory on your
host computer using rsync that will preserve the symlinks.
- On your host machine you may also have to install rsync
- sudo aptitude install rsync
- On the RaspberryPi install rsync:
- sudo apt-get istall rsync
- Create a folder on the cross compiling machine. For example, here we call it: ~/bin/RaspberryPi
- mkdir -p ~/bin/RaspberryPi
- cd to this folder
- cd ~/bin/RaspberryPi
- and do the following:
- rsync -rl pi@raspberrypi.bigpond:/lib .
- rsync -rl pi@raspberrypi.bigpond:/usr .
Remember to run these rsync commands whenever new libraries are added to the RaspberryPi system or when the RaspberryPi is upgraded.
This concludes our introduction to Cross Compilation for the Raspberry Pi using CMake.
Please share with us your comments, and suggestions for improving this process.
Check this out, there are other alternatives to Raspberry Pi:
Raspberry Pi vs MK802 II
http://www.cnx-software.com/2012/12/26/mk802-ii-mini-pc-now-costs-as-much-as-raspberry-pi-model-b-lets-compare-them/
Hi, thanks for the article.
When compiling the C++ toolchain, I got an error: .build/src/gcc-linaro-4.7-2013.01/gcc/tree-ssa-ccp.c:1335:43: error: ‘r1vam’ undeclared (first use in this function)
I checked the file on the Linaro repo, and saw that on line 1335,
maxmin = double_int_cmp (double_int_ior (r1vam, r1mask),
double_int_and_not (r2val, r2mask), uns);
should be
maxmin = double_int_cmp (double_int_ior (r1val, r1mask),
double_int_and_not (r2val, r2mask), uns);
I’m not sure why my file got ‘corrupted’, I just thought I should mention this for other people to check before starting the compilation (I was about 22 minutes in when this error occured).
Compilation worked fine after correcting the apparent syntax error.
I have followed the guide, but get the following error when i run the configure file:
checking for libintl.h… yes
checking whether gettext is declared… yes
checking ncurses/ncurses.h usability… no
checking ncurses/ncurses.h presence… no
checking for ncurses/ncurses.h… no
checking ncurses/curses.h usability… no
checking ncurses/curses.h presence… no
checking for ncurses/curses.h… no
checking ncursesw/curses.h usability… no
checking ncursesw/curses.h presence… no
checking for ncursesw/curses.h… no
checking ncurses.h usability… no
checking ncurses.h presence… no
checking for ncurses.h… no
checking curses.h usability… no
checking curses.h presence… no
checking for curses.h… no
configure: error: could not find curses header, required for the kconfig frontends
Any idea how to solve it? I tested to change the prefix to my own direction, but the same error occured
You nee to install ncurses5-dev
I mean i run this part of the tutorial:
./configure –prefix=/home/ddskroh/local/crosstool-ng
Very nice guide.
I ran into a problem at the ct-ng build step. I got the following error message:
ct-ng could not retrieve eglibc-2_17
The problem was caused by not having subversion installed.
It was fixed by:
sudo apt-get install subversion
Hello
First of all thank you for this tutorial, you have explained everything very well.
I have a problem at here:
“Time to test the C++ compiler with a Hello World…
Execute the cross-compiled executable”
In the last step I can’t execute it in Raspberry, it gives the error “No such file or directory”. Do you know a solution?, because the file is in the correct folder, so I can’t understand it
I have solved it, I think that it was a problem with the architecture
Thank for your time and Congratulations for this guide
I got the same problem could you help me solve it?
Yaiza,
Thanks for sharing the update and how you solved the problem.
Please let us know about what you do with the Raspberry Pi !
Thanks
how did he solved it? please help me I got the same issue
Hi,
I would like to suggest two additions to this approach:
– I have had problem linking “more advanced” c++ libraries when using gcc-4.7 for cross compiling. Raspbian used gcc 4.6.3. Using exactly the same version made these linker problems go away.
– Raspbian is based on Debian which uses the mutli arch directory layout for libraries. E.g. some libraries expected in /usr/lib are in /usr/lib/arm-linux-gnueabihf/ instead. GCC on debian is patched to search these directories by default, too, but the cross compiler built by ct-ng isn’t yet. I got around this with a special toolchain file (at least when using cmake):
I included following in the toolchain file:
set(CMAKE_LIBRARY_ARCHITECTURE arm-linux-gnueabihf)
so find_package will search these subfolders, too. Additionally, I set
set(CMAKE_EXE_LINKER_FLAGS “-rpath-link,${SYSROOT_PATH}/lib/${CMAKE_LIBRARY_ARCHITECTURE}:${SYSROOT_PATH}/usr/lib/${CMAKE_LIBRARY_ARCHITECTURE}” )
set(CMAKE_MODULE_LINKER_FLAGS “-rpath-link,${SYSROOT_PATH}/lib/${CMAKE_LIBRARY_ARCHITECTURE}:${SYSROOT_PATH}/usr/lib/${CMAKE_LIBRARY_ARCHITECTURE}” )
A patched cross gcc would be nicer of cause, then all the CMake stuff can be straightforward again, like described in this blog 🙂
Hi,
I am new here struggling with the building of cross compiler. I have followed this page http://www.kitware.com/blog/home/post/426, after running the following command i got the error
ct-ng build
Debugging detail is also attach with full detail.
[DEBUG] Not at this location: “http://ftp.kernel.org/pub/linux/kernel/v3.x/longterm/linux-3.6.3”
[ERROR]
[ERROR] >>
[ERROR] >> Build failed in step ‘Retrieving needed toolchain components’ tarballs’
[ERROR] >> called in step ‘(top-level)’
[ERROR] >>
[ERROR] >> Error happened in: do_kernel_get[scripts/build/kernel/linux.sh@728]
[ERROR] >> called from: main[scripts/crosstool-NG.sh@539]
[ERROR] >>
[ERROR] >> For more info on this error, look at the file: ‘build.log’
[ERROR] >> There is a list of known issues, some with workarounds, in:
[ERROR] >> ‘/home/arslan/local/crosstool-ng/share/doc/crosstool-ng/ct-ng.1.17.0/B – Known issues.txt’
[ERROR]
[ERROR] (elapsed: 19:15.76)
Kindly Guide me what I have to do now? Your suggestion will be highly appreciated.
Regards,
@Roland Ohlsson
It requires ncurses.h file, so if on fedora, yum install ncurses* will get you what’s missing
Roland,
Thanks for sharing the solution !
Luis
Hi Luis,
This page worked great for me – thank you! I did have one issue: I was unable to x-compile code that used C++11 futures/promises. To use these, gcc needs to be build with the flag –with-arch=armv6.
In ct-ng menuconfig, if I go to the item: Target options -> Architecture level, and set it to “armv6” (without quotes), then I am able to cross compile code that uses futures/promises.
Thought I would leave a comment here in case anyone else encounters the same problem (or you want to change these instructions).
Thanks again for documenting the x-compile process!
-Scott
Hi Scott,
Many thanks for sharing this finding about C++11.
I have now added your comment in the section on how to build the C++ compiler (it is now in a blue box comment).
Please keep all this good stuff coming !
Thanks
Luis
Hi Luis,
Just a quick note on the setting the architecture level. I set it at the very beginning of the build process. I’m not sure what will happen if you make the change after you build the C compiler (as currently specified in your notes). I’m guessing it will rebuild, so people would have to take two long coffee breaks.
I understand why you put it in the C++ section, but I would recommend putting it earlier in the build process.
-Scott
Hi Scott,
Thanks for pointing that out. I have now moved your note to the end of the configuration of the C compiler. Just before starting the build.
Please let me know if you see anything else that can be improved.
Thanks
Hi,
Getting this ugly error when I am running “ct-ng build”:
[INFO ] Installing PPL for host
[ERROR] /root/src/RaspberryPi/staging/.build/src/ppl-0.11.2/src/mp_std_bits.defs.hh:48:7: error: redefinition of ‘class std::numeric_limits’
[ERROR] /root/src/RaspberryPi/staging/.build/arm-unknown-linux-gnueabi/buildtools/include/gmpxx.h:3269:21: error: previous definition of ‘class std::numeric_limits’
[ERROR] /root/src/RaspberryPi/staging/.build/src/ppl-0.11.2/src/mp_std_bits.defs.hh:109:7: error: redefinition of ‘class std::numeric_limits’
[ERROR] /root/src/RaspberryPi/staging/.build/arm-unknown-linux-gnueabi/buildtools/include/gmpxx.h:3306:21: error: previous definition of ‘class std::numeric_limits’
[ERROR] /root/src/RaspberryPi/staging/.build/src/ppl-0.11.2/src/mp_std_bits.defs.hh:48:7: error: redefinition of ‘class std::numeric_limits’
[ERROR] /root/src/RaspberryPi/staging/.build/arm-unknown-linux-gnueabi/buildtools/include/gmpxx.h:3269:21: error: previous definition of ‘class std::numeric_limits’
[ERROR] /root/src/RaspberryPi/staging/.build/src/ppl-0.11.2/src/mp_std_bits.defs.hh:109:7: error: redefinition of ‘class std::numeric_limits’
[ERROR] /root/src/RaspberryPi/staging/.build/arm-unknown-linux-gnueabi/buildtools/include/gmpxx.h:3306:21: error: previous definition of ‘class std::numeric_limits’
[ERROR] /root/src/RaspberryPi/staging/.build/src/ppl-0.11.2/src/mp_std_bits.defs.hh:48:7: error: redefinition of ‘class std::numeric_limits’
[ERROR] /root/src/RaspberryPi/staging/.build/arm-unknown-linux-gnueabi/buildtools/include/gmpxx.h:3269:21: error: previous definition of ‘class std::numeric_limits’
[ERROR] /root/src/RaspberryPi/staging/.build/src/ppl-0.11.2/src/mp_std_bits.defs.hh:109:7: error: redefinition of ‘class std::numeric_limits’
[ERROR] /root/src/RaspberryPi/staging/.build/arm-unknown-linux-gnueabi/buildtools/include/gmpxx.h:3306:21: error: previous definition of ‘class std::numeric_limits’
[ERROR] make[4]: *** [Checked_Number.lo] Error 1
[ERROR] /root/src/RaspberryPi/staging/.build/src/ppl-0.11.2/src/mp_std_bits.defs.hh:48:7: error: redefinition of ‘class std::numeric_limits’
[ERROR] /root/src/RaspberryPi/staging/.build/arm-unknown-linux-gnueabi/buildtools/include/gmpxx.h:3269:21: error: previous definition of ‘class std::numeric_limits’
[ERROR] /root/src/RaspberryPi/staging/.build/src/ppl-0.11.2/src/mp_std_bits.defs.hh:109:7: error: redefinition of ‘class std::numeric_limits’
[ERROR] /root/src/RaspberryPi/staging/.build/arm-unknown-linux-gnueabi/buildtools/include/gmpxx.h:3306:21: error: previous definition of ‘class std::numeric_limits’
[ERROR] make[4]: *** [checked.lo] Error 1
[ERROR] /root/src/RaspberryPi/staging/.build/src/ppl-0.11.2/src/mp_std_bits.defs.hh:48:7: error: redefinition of ‘class std::numeric_limits’
[ERROR] /root/src/RaspberryPi/staging/.build/arm-unknown-linux-gnueabi/buildtools/include/gmpxx.h:3269:21: error: previous definition of ‘class std::numeric_limits’
[ERROR] /root/src/RaspberryPi/staging/.build/src/ppl-0.11.2/src/mp_std_bits.defs.hh:109:7: error: redefinition of ‘class std::numeric_limits’
[ERROR] /root/src/RaspberryPi/staging/.build/arm-unknown-linux-gnueabi/buildtools/include/gmpxx.h:3306:21: error: previous definition of ‘class std::numeric_limits’
[ERROR] make[4]: *** [Constraint.lo] Error 1
[ERROR] make[4]: *** [Constraint_System.lo] Error 1
[ERROR] make[4]: *** [Box.lo] Error 1
[ERROR] make[3]: *** [all] Error 2
[ERROR] make[2]: *** [all-recursive] Error 1
[ERROR] make[1]: *** [all] Error 2
[ERROR]
[ERROR] >>
[ERROR] >> Build failed in step ‘Installing PPL for host’
[ERROR] >> called in step ‘(top-level)’
[ERROR] >>
[ERROR] >> Error happened in: CT_DoExecLog[scripts/functions@257]
[ERROR] >> called from: do_ppl_backend[scripts/build/companion_libs/120-ppl.sh@128]
[ERROR] >> called from: do_ppl_for_host[scripts/build/companion_libs/120-ppl.sh@78]
[ERROR] >> called from: do_companion_libs_for_host[scripts/build/companion_libs.sh@36]
[ERROR] >> called from: main[scripts/crosstool-NG.sh@632]
[ERROR] >>
Have installed libgmp3-dev with no result.
Thanks
I the last step when I try to do the following:
rsync -rl pi@raspberrypi.bigpond:/lib .
rsync -rl pi@raspberrypi.bigpond:/usr .
ssh: Could not resolve hostname xxx.xxx.xxx.xxx.bigpond: Name or service not known
rsync: connection unexpectedly closed (0 bytes received so far) [Receiver]
rsync error: unexplained error (code 255) at io.c(605) [Receiver=3.0.9]
Godfrey,
the command should be only
rsync -rl pi@raspberrypi:/lib .
(no “bigpond”,… that was only an example of a domain)
or to be more explicit, put the IP address of your raspberrypi.
It should look like:
rsync -rl pi@192.168.200.123:/lib .
but, of course, with your actual IP address, instead of the example “192.168.200.123”.
More on rsync here:
http://www.linux.com/news/enterprise/storage/8200-back-up-like-an-expert-with-rsync
I also added another answer that may help others.
http://stackoverflow.com/questions/24141486/cmake-cross-compilation-fails-during-linking-stage-on-host-target-is-raspberry
This is an excellent tutorial!
I had to also install:
gawk
libncurses5-dev
subversion
Hi,
I managed to get the C compiler work following the example, but I cannot check the “C++” checkbox in C Compiler -> C++ and do the second part of the tutorial. Any idea why?
Please note that in a fresh distribution of Ubuntu/Mint you need to install curses5-dev to alleviate cmake nagging for not founding curses headers. In other words, you need to do this:
sudo apt-get install bison cvs flex gperf texinfo automake libtool curses5-dev
./configure –prefix=/home/src/
make
sudo make install
export PATH=”${PATH}:/home/src/bin”
I am using crosstool-ng 1.23.0.rc2 for cross compilation.
Followed the steps:
$ sudo apt-get install gperf bison flex makeinfo texinfo help2man ncurses-dev
$ mkdir -p ~/src/toolchain
$ ~/src/toolchain/
$ wget http://crosstool-ng.org/download/crosstool-ng/crosstool-ng-1.23.0.rc2.tar.bz2
$ tar xjf crosstool-ng-1.23.0.rc2.tar.bz2
$ cd crosstool-ng-1.23.0.rc2/
$ mkdir -p ~/local/crosstool-ng
$ ./configure –prefix=/home/iiitd/local/crosstool-ng
$ make
$ sudo make install
$ sudo cp ct-ng.comp /etc/bash_completion.d/
$ export PATH=$PATH:/home/iiitd/local/crosstool-ng/bin
$ mkdir -p ~/src/staging
$ cd ~/src/staging/
$ ct-ng menuconfig
In the menuconfig interface I have done the following changes:
Enable “Try features marked as EXPERIMENTAL”
Set the “Prefix directory” from “${HOME}/x-tools/${CT_TARGET}” to “${HOME}/local/x-tools/${CT_TARGET}”
“Target Architecture” is set to “arm”
“Little Endian” and “32bit” are selected
“Use EABI” is selected
“Target OS” to Linux
Enable “Show Linaro versions”
Enable “C++” in order to have C++ compiler
Save and Exit
$ ct-ng build
.config: line 526: unexpected EOF while looking for matching `”‘
.config: line 534: syntax error: unexpected end of file
[ERROR]
[ERROR] >>
[ERROR] >> Build failed in step ‘(top-level)’
[ERROR] >>
[ERROR] >> Error happened in: CT_LoadConfig[scripts/functions@15]
[ERROR] >> called from: main[scripts/crosstool-NG.sh@22]
[ERROR] >>
[ERROR] >> There is a list of known issues, some with workarounds, in:
[ERROR] >> ‘/home/iiitd/local/crosstool-ng/share/doc/crosstool-ng/crosstool-ng-1.23.0-rc2/B – Known issues.txt’
[ERROR]
[ERROR] (elapsed: 24863888:00.96)
/home/iiitd/local/crosstool-ng/bin/ct-ng:147: recipe for target ‘build’ failed
make: *** [build] Error 1
Great article. Everything seems to work pretty well, except (and this is more of a CMake question),,, could you elaborate a bit more on the Toolchain file – specifically how to get cmake to look for the RPi libs and headers in the correct library while using the intel based cross compile executables?
Followed the steps :
Followed the steps:
$ sudo apt-get install gperf bison flex makeinfo texinfo help2man ncurses-dev
$ mkdir -p ~/src/toolchain
$ ~/src/toolchain/
$ wget http://crosstool-ng.org/download/crosstool-ng/crosstool-ng-1.23.0.rc2.tar.bz2
$ tar xjf crosstool-ng-1.23.0.rc2.tar.bz2
$ cd crosstool-ng-1.23.0.rc2/
$ mkdir -p ~/local/crosstool-ng
$ ./configure –prefix=/home/iiitd/local/crosstool-ng
$ make
Error hit after this :
Makefile:115: *** Recursion detected, bailing out…. Stop.
Makefile:120: recipe for target ‘build’ failed
make: *** [build] Error 2
Kindly give a solution to fix this
Hey – on my ubuntu 18, you actually also need package ‘libtool-bin’ – libtool itself isn’t enough for configure to run through.
I have also written a beginner friendly tutorial for cross compiling computer vision applications for Rasbperry Pi 4. Check it out here: https://medium.com/trueface-ai/trueface-tutorials-how-to-cross-compile-popular-computer-vision-c-frameworks-for-raspberry-pi-4-afcbe2dcc302
When I compile a library, it reports that sys/cdefs.h: No such file or directory. It is there, I swear. I have seen something that indicates that multiarch may be problematic, but I don’t know how to fix this. Help Appreciated.
I think you need to configure C library to be set to glibc as well.